issue-6550
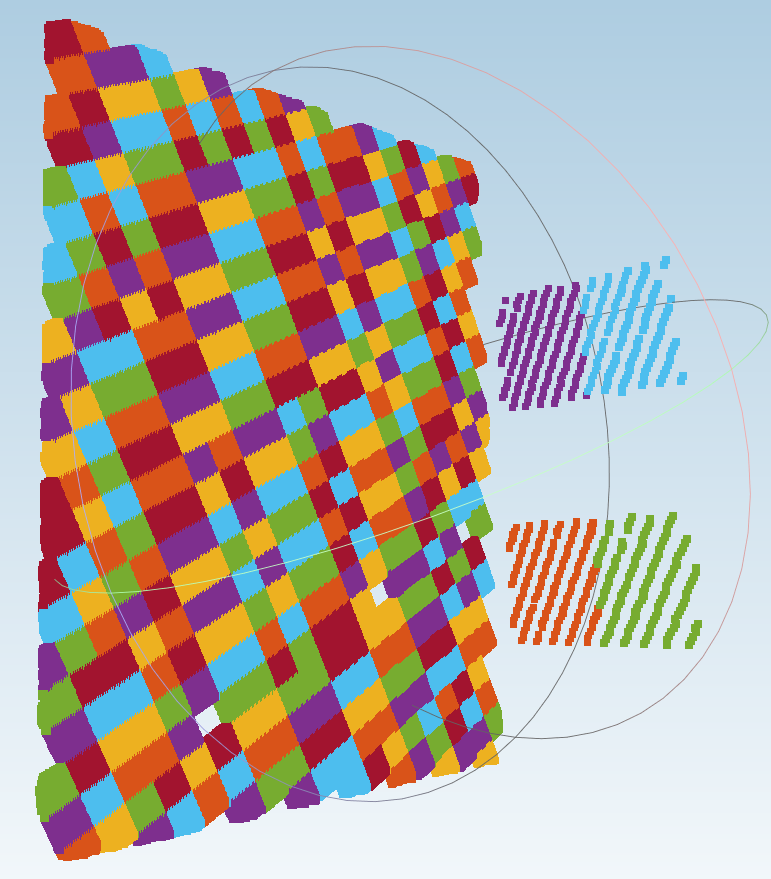
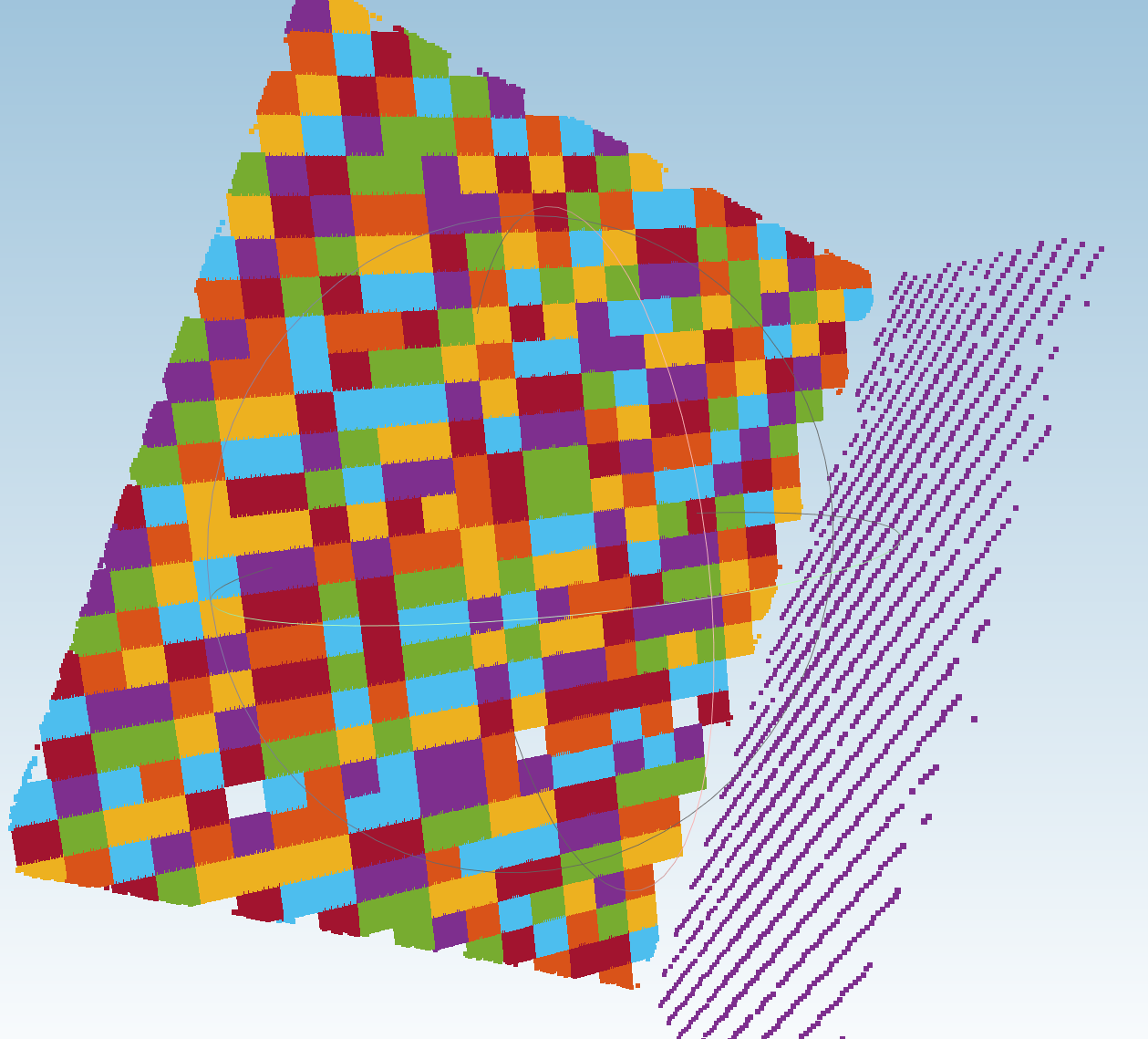
detect_planar_patches fails with perfectly flat surfaces
Debug 过程
static std::array<Eigen::Vector3d, 6> colors = {
Eigen::Vector3d(0.8500, 0.3250, 0.0980),
Eigen::Vector3d(0.9290, 0.6940, 0.1250),
Eigen::Vector3d(0.4940, 0.1840, 0.5560),
Eigen::Vector3d(0.4660, 0.6740, 0.1880),
Eigen::Vector3d(0.3010, 0.7450, 0.9330),
Eigen::Vector3d(0.6350, 0.0780, 0.1840)};
PointCloud dummy;
for (size_t i = 0; i < planes.size(); i++) {
auto& plane = planes[i];
auto pcd = this->SelectByIndex(plane->indices_);
pcd->PaintUniformColor(colors[i % colors.size()]);
dummy += *pcd;
}