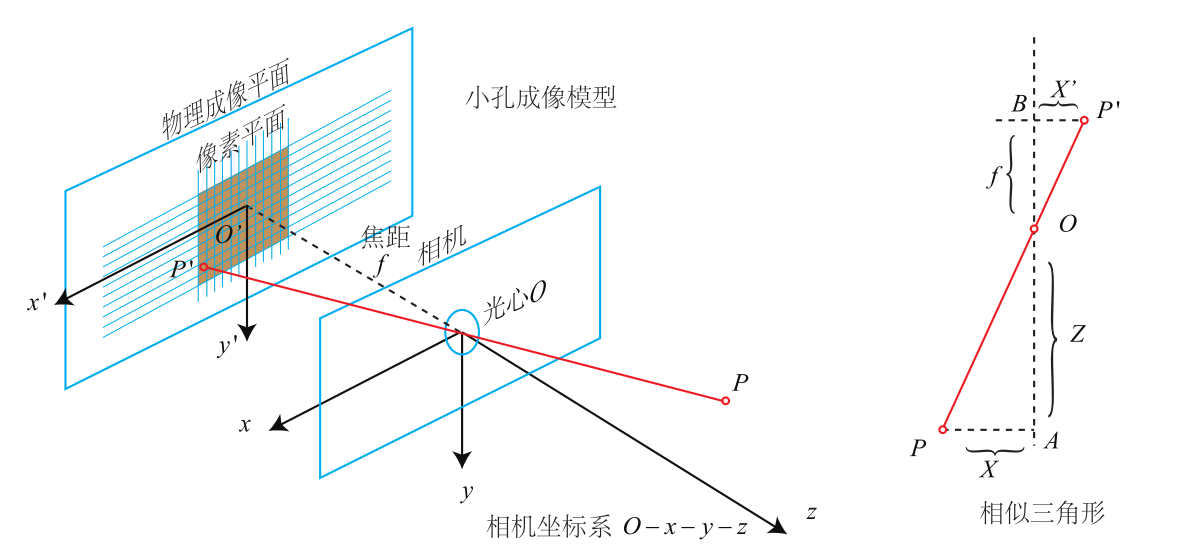
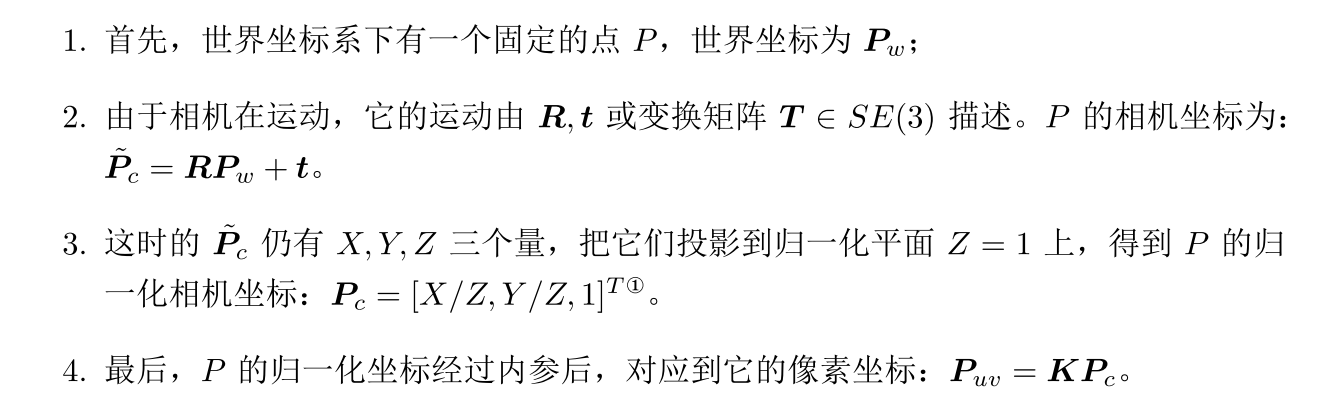
相机将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)的过程 能够用一个几何模型进行描述。这个模型有很多种,其中最简单的称为针孔模型。
单目相机
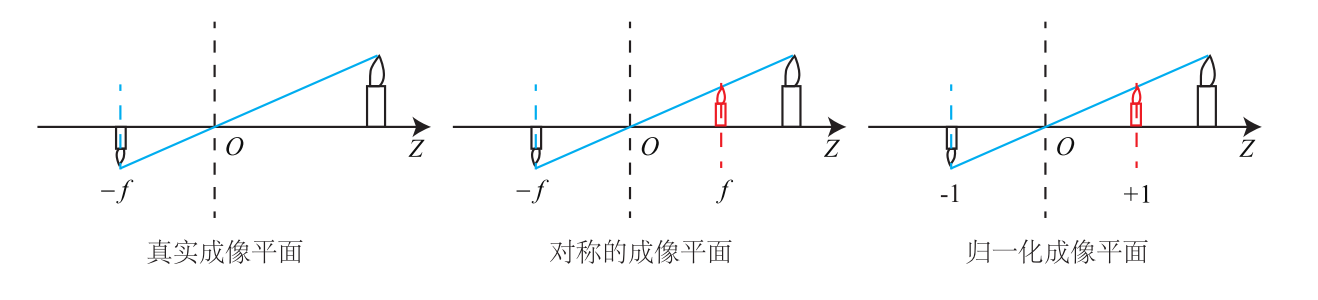
针孔模型
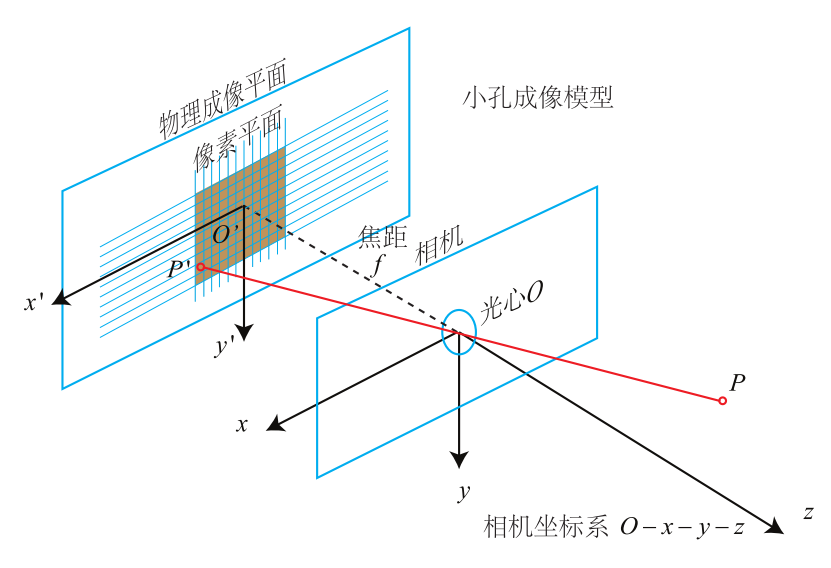
- : 焦距
- : 三维空间相对于光心的坐标(相机坐标系)
- : 投影到相对于的坐标
像素坐标系
原点 o′ 位于图像的左上角,u 轴向右与 x 轴平行,v轴向下与 y 轴平行。像素坐标系与成像平面之间,相差了一个缩放和一个原点的平移。
设像素坐标在 u 轴上缩放了 α 倍,在 v 上缩放了 β 倍。同时,原点平移了
- : 相机内参数矩阵
- : 相机坐标系下的点的坐标
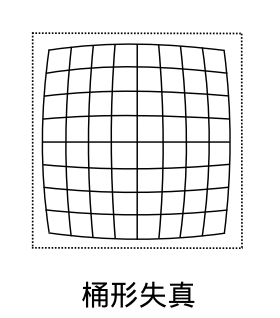
畸变
-
径向畸变(穿过图像中心和光轴有交点的直线还能保持形状不变)
-
切向畸变

总结
Camera库
project_point_radial
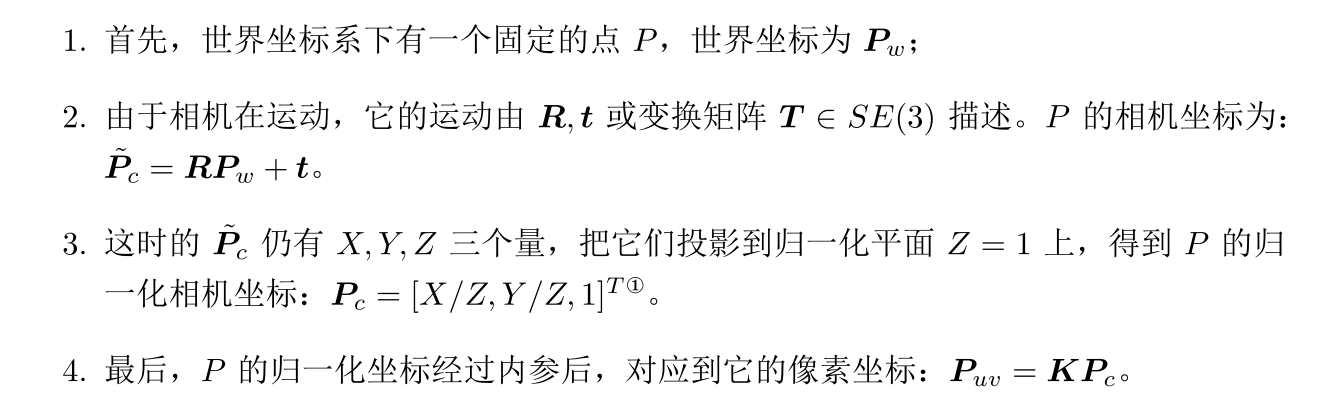
- 世界坐标系转换到相机坐标系
N = P.shape[0]
X = R.dot(P.T - T) # rotate and translate- 归一化
XX = X[:2, :] / X[2, :] # 2x16- 调整过畸变的相机坐标转像素坐标(物理成像面)
Proj = (f * XXX) + c # 2x16
Proj = Proj.T- 相机坐标的深度
D = X[2, ]load_camera_params
- : 相机旋转矩阵
- : 相机平移矩阵
- : 相机焦距长度
- : 相机中心
- : 相机径向变形系数
- : 相机切向变形系数
双目相机
基础模型
首先这个模型是基于针孔模型的
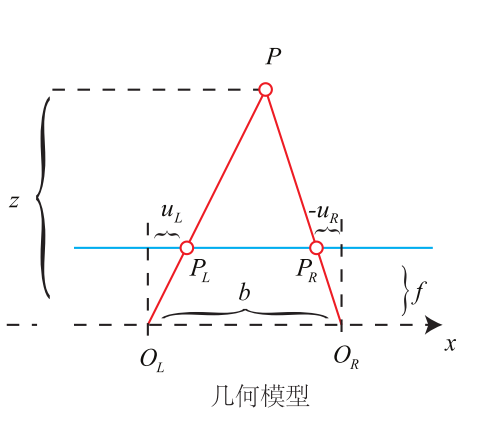
- : 像素坐标
- : 光心
- : 基线
- : 需要求的深度
为左右图的横坐标之差,称为视差